露天煤矿l5无人驾驶系统
露天煤矿无人驾驶l5矿用自卸车可实现车辆位置和姿态等自身状态、车辆运行周围环境等信息的精确感知、路径规划与决策、轨迹跟踪与控制、主动避撞、人机交互等自动驾驶所需功能。根据各传感器信息和车辆运动状态,自动驾驶车辆能够实时判断车辆是否处于危险状态,进而做出控制决策保证行车安全,并根据车辆当前位置、目标位置、电子地图和任务要求,规划并跟踪行驶路径。总的来说,在无人驾驶的情况下,能按特定路线行驶和装载、卸载,自动完成工作循环,有意外情况时能减速或停车。
系统组成
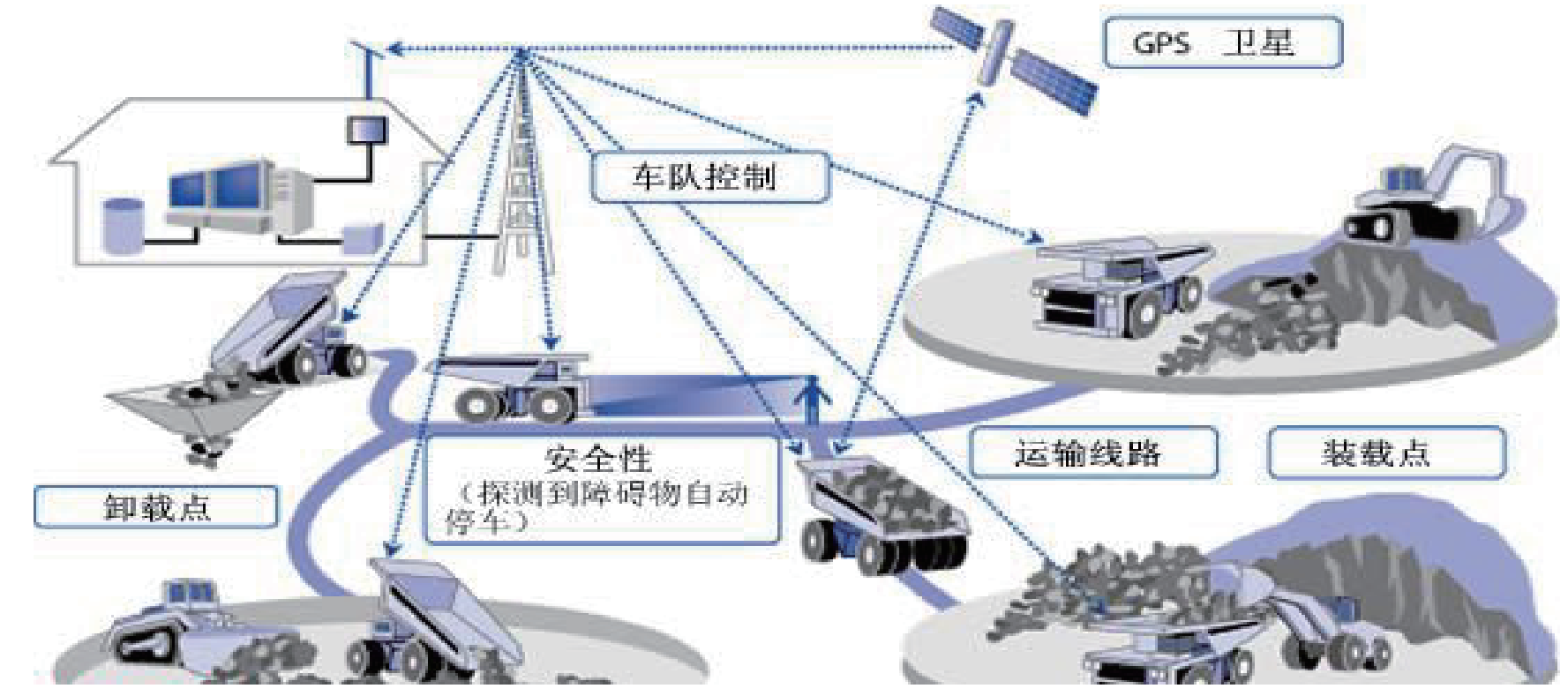
系统功能
1、矿山道路自主巡航;
2、矿山主动避障功能;
3、路口自动转向功能;
4、自动路径规划、导航、定位功能;
5、车站等定点停车功能;
6、自动装载和卸载功能;
7、人机交互功能;
8、高精度地图构建;
9、矿山车队管理系统。